
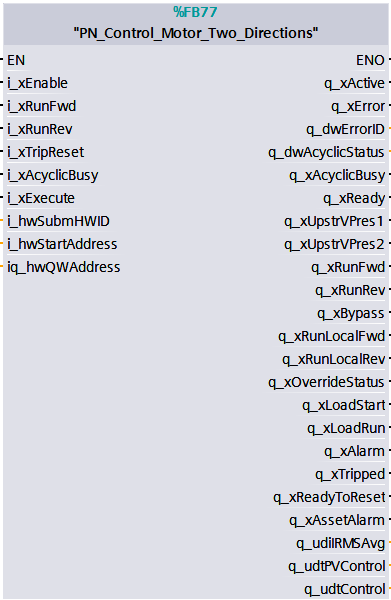
PN_Control_Motor_Two_Directions (PROFINET IO)
Las siguientes tablas proporcionan información acerca de los parámetros de interfaz del bloque funcional.
Entradas
|
Entrada |
Tipo datos |
Descripción |
Categoría de variables |
|---|---|---|---|
|
i_xEnable |
BOOL |
Activa el procesamiento de bloques funcionales. Los datos cíclicos se leerán/escribirán en la interfaz de E/S del hardware. |
Control de bloque funcional |
|
i_xRunFwd |
BOOL |
Si esta entrada se establece en TRUE, el conmutador de marcha del Avatar se cierra. |
Datos cíclicos |
|
i_xRunRev |
BOOL |
Si esta entrada se establece en TRUE, el conmutador de retroceso del Avatar se cierra. |
Datos cíclicos |
|
i_xTripReset |
BOOL |
Si esta entrada se establece en TRUE, los disparos detectados de este Avatar cuyas condiciones de rearme se hayan cumplido se rearmarán. |
Datos cíclicos |
|
i_xAcyclicBusy |
BOOL |
Puede utilizarse para bloquear la ejecución acíclica si está activa la comunicación acíclica de otro bloque funcional. |
Control de bloque funcional |
|
i_xExecute |
BOOL |
Inicia la solicitud acíclica en un flanco ascendente. |
Control de bloque funcional |
|
i_hwSubmHWID |
HW_IO |
Debe corresponderse con el identificador de hardware del submódulo acíclico del Avatar correspondiente para poder ejecutar la comunicación acíclica. |
Parámetro de comunicación |
|
i_hwStartAddress |
Variante |
Debe corresponderse con la primera dirección del rango de dirección del submódulo de entrada cíclica del Avatar correspondiente para poder ejecutar la comunicación de lectura cíclica. |
Parámetro de comunicación |
In/Out
|
InOut |
Tipo datos |
Descripción |
Categoría de variables |
|---|---|---|---|
|
iq_hwQWAddress |
WORD |
Debe corresponderse con la dirección del submódulo de salida cíclica para poder ejecutar la comunicación de escritura cíclica. |
Parámetro de comunicación |
Salidas
|
Salida |
Tipo datos |
Descripción |
Categoría de variables |
|---|---|---|---|
|
q_xActive |
BOOL |
Si esta salida se establece en TRUE, se activa el bloque funcional de Avatar, o bien una solicitud acíclica está ocupada. |
Estado de bloque funcional |
|
q_xError |
BOOL |
Si esta salida se establece en TRUE, se ha producido un error detectado mientras se ejecutaba el bloque funcional de Avatar. Para obtener información detallada sobre el error detectado, consulte el valor de la ID de error. |
Estado de bloque funcional |
|
q_dwErrorID |
DWORD |
La ID de error muestra información detallada sobre el error detectado producido. Los valores posibles se muestran en la tabla siguiente. |
Estado de bloque funcional |
|
q_dwAcyclicStatus |
DWORD |
El Estado acíclico ofrece información detallada sobre la comunicación por bus de campo acíclica, con detalles sobre el error detectado. Para obtener información detallada sobre los valores de estado, consulte Biblioteca de bloques funcionales. |
Estado de bloque funcional |
|
q_xAcyclicBusy |
BOOL |
Si esta salida se establece en TRUE, una solicitud acíclica sigue ocupada. |
Estado de bloque funcional |
|
q_xReady |
BOOL |
Indica TRUE si el bloque funcional está listo para recibir un comando Ejecutar. |
Datos cíclicos |
|
q_xUpstrVPres1 |
BOOL |
Si esta salida se establece en TRUE, el Avatar ha detectado que hay presente alimentación principal aguas arriba del primer arrancador/dispositivo de alimentación de este Avatar. |
Datos cíclicos |
|
q_xUpstrVPres2 |
BOOL |
Si esta salida se establece en TRUE, el Avatar ha detectado que hay presente alimentación principal aguas arriba del segundo arrancador/dispositivo de alimentación de este Avatar. |
Datos cíclicos |
|
q_xRunFwd |
BOOL |
Si esta salida se establece en TRUE, el conmutador de marcha del Avatar se cierra. |
Datos cíclicos |
|
q_xRunRev |
BOOL |
Si esta salida se establece en TRUE, el conmutador de retroceso del Avatar se cierra. |
Datos cíclicos |
|
q_xBypass |
BOOL |
Si esta salida se establece en TRUE, se establece el comando de derivación del Avatar. |
Datos cíclicos |
|
q_xRunLocalFwd |
BOOL |
Si esta salida se establece en TRUE, se establece el comando de avance local del Avatar. |
Datos cíclicos |
|
q_xRunLocalRev |
BOOL |
Si esta salida se establece en TRUE, se establece el comando de retroceso local del Avatar. |
Datos cíclicos |
|
q_xOverrideStatus |
BOOL |
Si esta salida se establece en TRUE, se establece el modo manual del Avatar. |
Datos cíclicos |
|
q_xLoadStart |
BOOL |
Si esta salida se establece en TRUE, el motor se encuentra en fase de arranque. |
Datos cíclicos |
|
q_xLoadRun |
BOOL |
Si esta salida se establece en TRUE, se ha ejecutado un comando Marcha o Cerrar y fluye corriente en los polos (equivalente a un motor en funcionamiento, pero también aplicable a Avatares sin motor). |
Datos cíclicos |
|
q_xAlarm |
BOOL |
Si esta salida se establece en TRUE, el Avatar ha detectado una alarma de protección. |
Datos cíclicos |
|
q_xTripped |
BOOL |
Si esta salida se establece en TRUE, el Avatar ha detectado un evento de disparo de protección. |
Datos cíclicos |
|
q_xReadyToReset |
BOOL |
Si esta salida se establece en TRUE, el Avatar cumple las condiciones de rearme de disparo y puede restablecerse mediante un comando Rearme de disparo. |
Datos cíclicos |
|
q_xAssetAlarm |
BOOL |
Si esta salida se establece en TRUE, un dispositivo de potencia o SIL* El arrancador del interior del Avatar ha alcanzado o superado el 90 % de la durabilidad prevista (según el parámetro del Avatar). |
Datos cíclicos |
|
q_udiIRMSAvg |
UDINT |
Indica la media de los valores de Irms de corriente de fase más recientes. (Unidad: A) |
Datos cíclicos |
|
q_udtPVControl |
UDT_PVControl |
Se trata de una estructura de los datos de estado PV cíclicos para los Avatares de control. Para obtener información detallada sobre la estructura de este UDT, consulte UDT_PVControl. |
Datos cíclicos |
|
q_udtControl |
UDT_Control |
Se trata de una estructura de los datos acíclicos para los Avatares de control, que incluye información sobre los mensajes de alarma y disparo e información de mantenimiento sobre el Avatar. Para obtener información detallada sobre la estructura de este UDT, consulte UDT_Control. Para ver una descripción general de los miembros del UDT admitidos por este Avatar, consulte Miembros admitidos de UDT_Control. |
Datos acíclicos |
Códigos de estado y error procedentes de ConstTeSysIsland
|
Nombre del miembro |
Utilizado por el bloque funcional |
|---|---|
|
Cdw_ErrNoMsg |
Sí |
|
Cdw_ErrInternal |
Sí |
|
Cdw_ErrInvalidCycInAddr |
Sí |
|
Cdw_ErrInvalidHwid |
Sí |
|
Cdw_ErrInvalidNumOfAvatars |
No |
|
Cdw_ErrReadCycIn |
Sí |
|
Cdw_ErrReadAcycData1 |
Sí |
|
Cdw_ErrReadAcycData2 |
No |
|
Cdw_ErrWriteAcycData |
No |
|
Cdw_StsReadAcycData1Compl |
Sí |
|
Cdw_StsReadAcycData2Compl |
No |
|
Cdw_StsWriteAcycDataCompl |
No |